Prussaka juhitav mobiilne robot
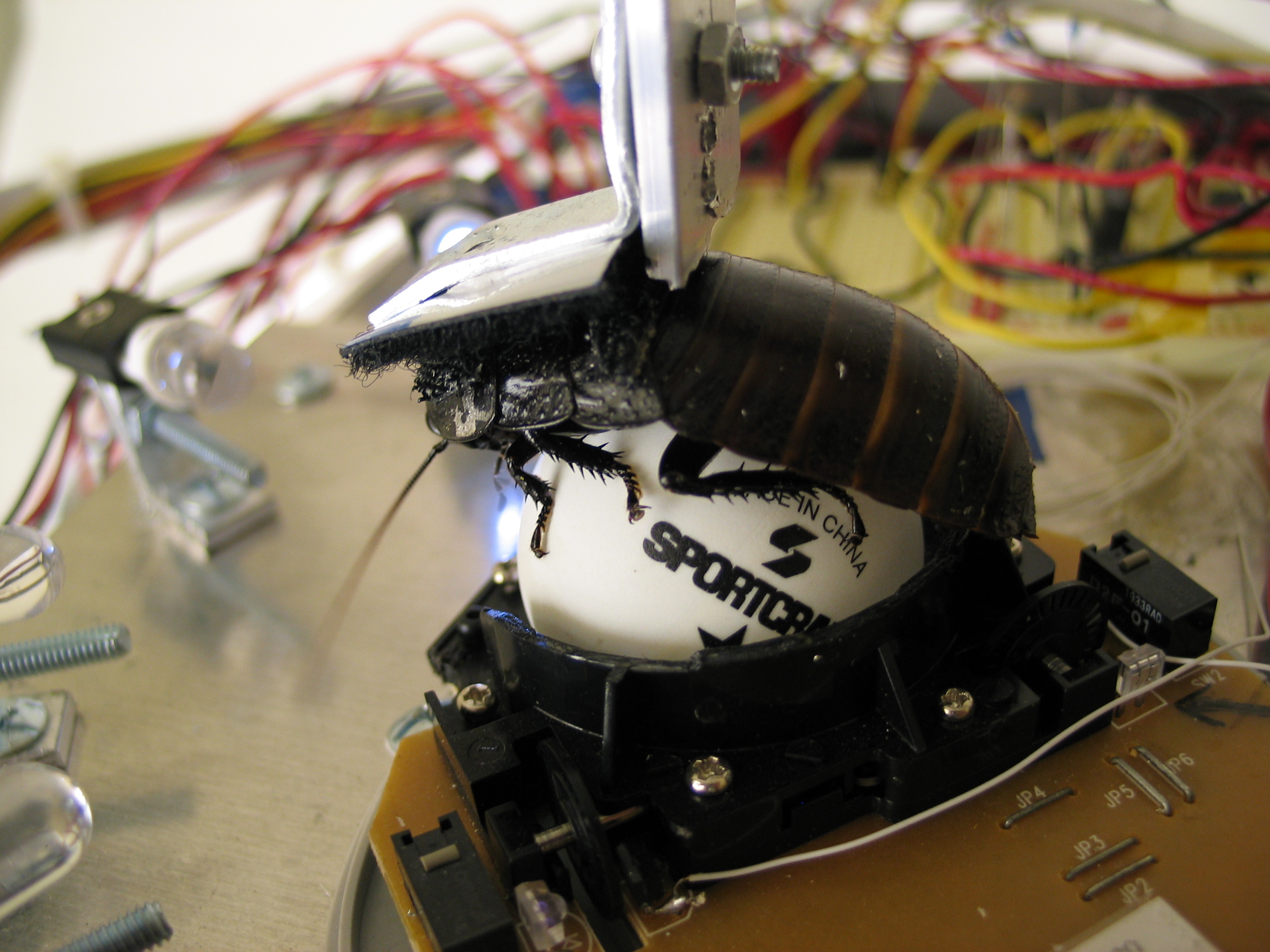
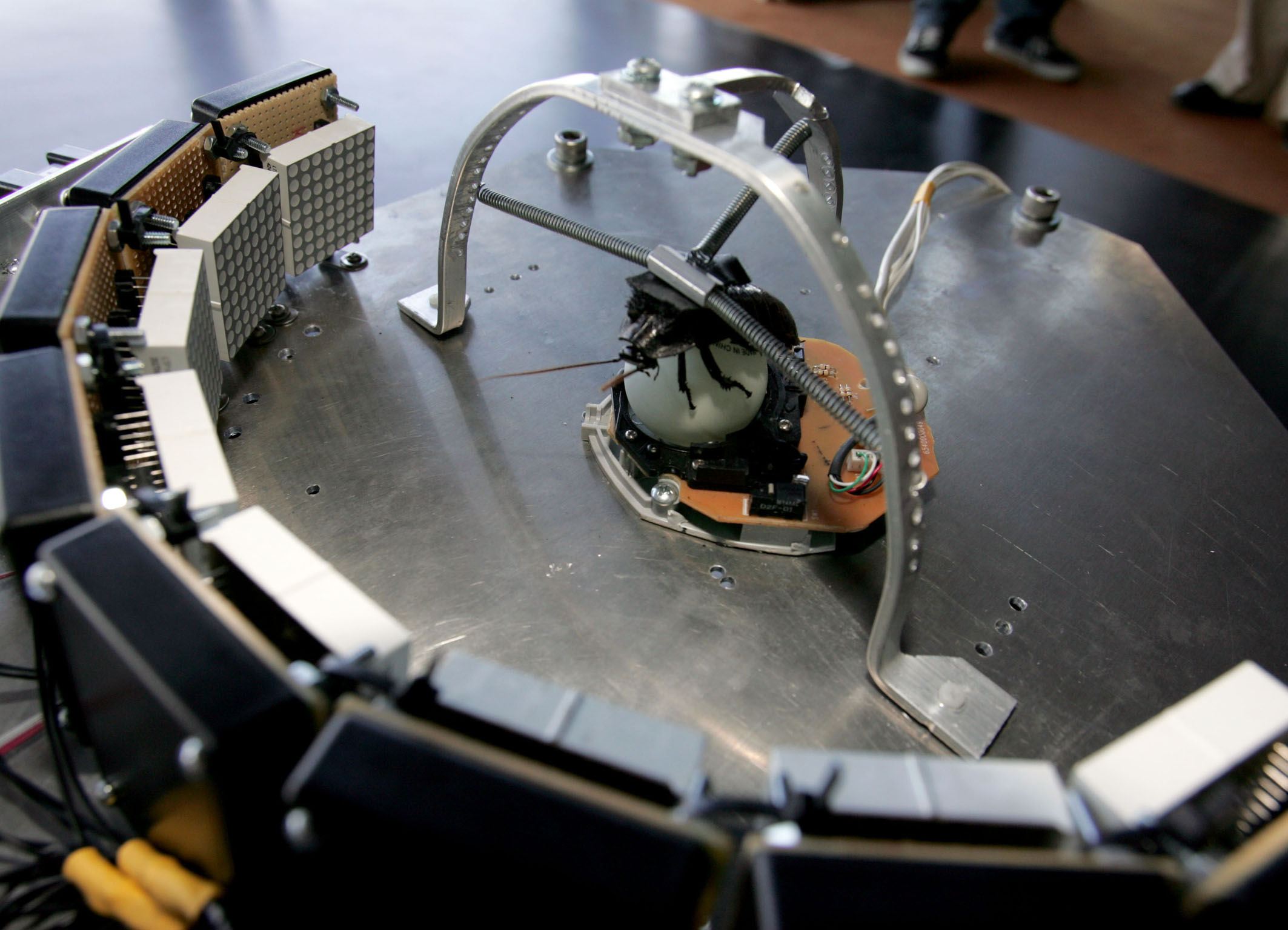
“Prussaka juhitav mobiilne robot” on eksperimentaalne hübriidsüsteem, mis muudab putuka keha liigutused kolmerattalise roboti mehhaaniliseks liikumiseks. Prussaka ees on distants-sensorid (LED paneelid), mis vastavalt objekti kaugusele muudavad heledust ja annavad tagasisidet prussakale, et ta kuhugi otsa ei sõidaks. Prussakas üritab alati liikuda selles suunas kus on pimedam, ehk kus LED´id ei põle. Tänu kavalale tagasisidele on loodud pseudo-intelligentne süsteem, kus prussakas mängib keskset kompuuturi rolli. Loodud hübriidsüsteem ühendab endas nii bioloogia kui ka mehhatroonika mis kõik sobib mõiste Cyborg alla [1].
Ca 5 cm pikkune prussakas juhtpallil:

Prussaka ees olevad distants-LED-paneelid:
Cyborg on poppkultuur mis tunneb huvi inim- ja loom-hübriidmasinate vastu. “Prussaka juhitav mobiilne robot” on pisike näide “Science Fiction” kontseptsioonist millest on olnud juttu tuhandetes ulmeromaanides. Loodud roboti mikrokontroller juhtimist asendabki prussakas liigutades jalgadega tema kõht alla olevat kuuli mis töötab nagu arvutihiir edastades juhimissignaali elektrimootoritele.
Roboti looja Garnet Hertz on kunstnik, isetegija, teoreetik kes uurib tehnika arenguvõimalusi, loovust, innovatsiooni ja interdistsiplinaarsust. Hertz töötab Kalifornia Ülikoolis (Irvine) kunsti ja informaatika instituudi teadlasena [1].
Allikas: