
Mootorikontroller väike-elektrisõidukitele
Minu magistritöö valmis huvist elektrisõidukite vastu. Varem oli mul plaan ehitada elektriline longboard, kuid sõidetavate teede vähesuse ja osalt muude põhjuste tõttu jäi see plaan sinnapaika. Selle asemel võtsin vähe praktilisema eesmärgi. Tahtsin luua universaalsemat mootorikontrollerit, mida saaks kasutada paljudes rakendustes, nagu elektrijalgrattad, tasakaaluliikurid, ratastoorid jne. Töö pealkirjaks sai “Kahe kolmefaasilise mootori vektorjuhtimise võimekusega mootorikontrolleri arendus”.
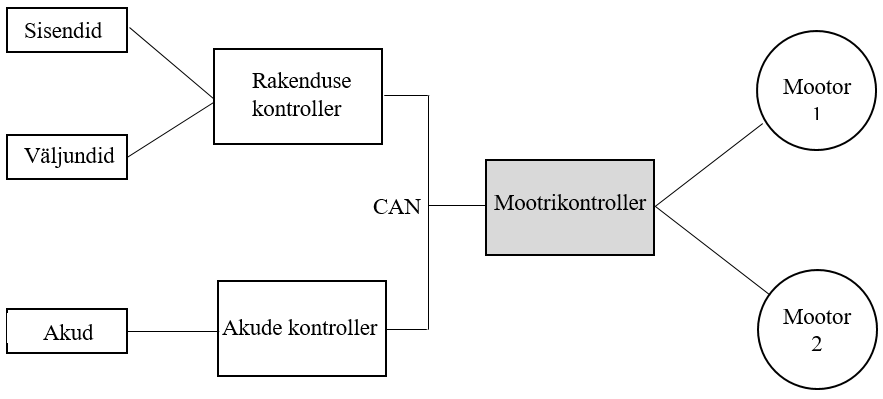
Magistritöö raames sai ehitatud mootorikontrolleri väike-elektrisõidukit tarbeks. Kontroller on modulaarse ehitusega ning koosneb juhtmoodulist ning kuni kahest vaheldi moodulist. Seega on võimalik juhtida kuni kahte kolmefaasilist mootorit. Vastavalt rakendusele saab valida sobiva võimsuse ning sisendpingega vaheldi mooduleid.
Mootoreid juhitakse väljavektorjuhtimise teel, kastutades selleks Texas Instrumentsi InstaSpin lahendust. Tänu sellele on võimalik juhtida püsimagnetmootoreid kui ka induktsioonmootoreid efektiivselt üsna väikese vaevaga.
Mootori juhtimiseks vajalikud signaalid antakse üle CAN andmeside rakenduse kontrollerist. Sellise lahenduse eeliseks võiks olla see, et mootorikontroller on kastutatav rohkemates rakendustes ning sellel ei pea olema rakenduse spetsiifilisi sisendeid ja väljundeid. Vastavalt rakendusele valitakse rakenduse kontroller ning mootorikontrolleri puhul piisab vaid seadistamisest.
Antud töös sai ehitatud vaheldi moodulid juhtimaks 48 V 1 kW jalgratta rummumootorit. Valmis kontroller on kujutatud järgnevatel piltidel.
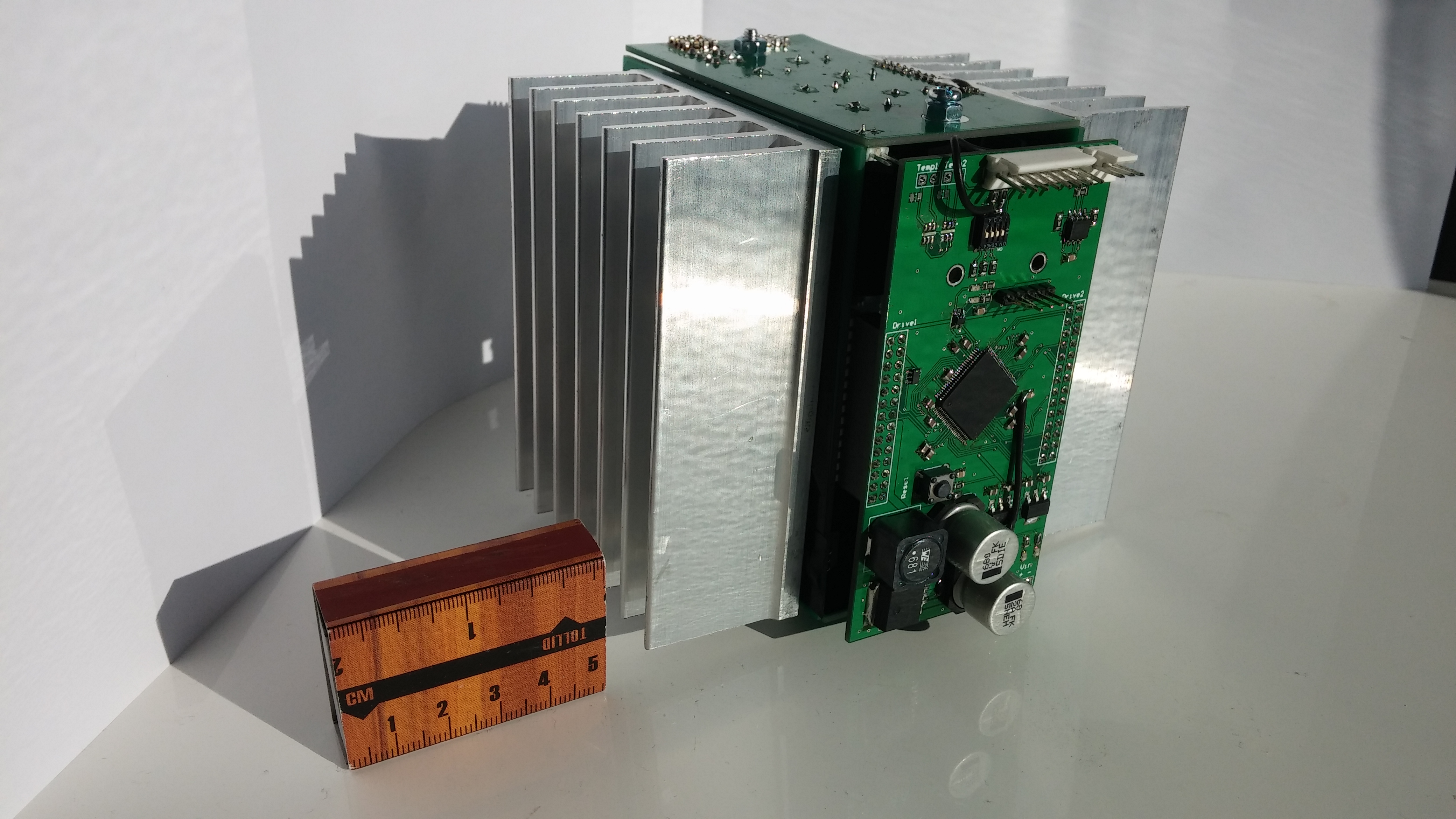

Testimiseks sai ehitatud katseratas (alumine joonis). Tegemist on ajutise lahendusega, nii kole päris ratas ei tule 😀 . Kuna praegusel katserattal ei ole rakenduse kontrollerit, on mootori juhtsignaal antud potentsiomeetriga, mis on paigaldatud teise vaheldi asemele (nagunii on sellel rattal ainult 1 mootor). Suurema pingega aku puudumise tõttu on sellel rattal kasutatud 6 elemendilist LiPo akut (22,2 V). Madalama toitepinge tõttu on piiratud ka jõudlus. Selle akuga on ratta maksimaalne kiirus 24-25 km/h.
Selle töö raames ehitatud seadme puhul on tegemist esimese prototüübiga. Arendamisel on juba uus versioon, mis on mõõtmetelt väiksem, korpusega ning parema elektroonika disainiga.
Sama jutt videona ja natuke sõitmise kaadreid ka:
Sõitmise kaadrid said salvestatud väljundvoolu piiramisega 25 A juures. Seade töötab ka 35 A juures ning kiirendab kiiremini kui selles videos.